
Hm, I realized that I
announced this on Google+ (via Rcpp) as well as
on Twitter,
on the
r-packages list,
wrote a new and simple
web page for it,
but had not put it on my blog. So here is some catching up.
Sequential Monte Carlo / Particle Filter
is a (to quote the Wikipedia page I just linked to)
sophisticated model estimation technique based on simulation.
They are related to both Kalman Filters, and Markov Chain Monte Carlo
methods.
Adam Johansen
has a rather nice set of C++ classes documentated in his
2009 paper in the Journal of
Statistical Software (JSS).
I started to play with these classes and realized that, once again, this would make
perfect sense in an R extension built with the
Rcpp
package by
Romain and
myself (and in
JSS too). So I put a first prototype onto
R-Forge and emailed
Adam who, to my pleasant surprise, was quite interested. And a couple of
emails, and commits later, we are happy to present a very first release
0.1.0.
I wrote a few words on a
RcppSMC page
on my website where you can find a few more details. But in short, we
already have example functions demonstrating the backend classes by
reproducing examples from
- Johansen (2009)
- and his example 5.1 via
pfLineartBS() for a linear
bootstrap example;
- Doucet, Briers and Senecal (2006)
- and their (optimal) block-sampling particle filter for a linear Gaussian model
(serving as an illustration as the setup does of course have an analytical
solution) via the function
blockpfGaussianOpt()
- Gordon, Salmond and Smith (1993)
- and their ubiqitous nonlinear state space model via the
function
pfNonlinBS().
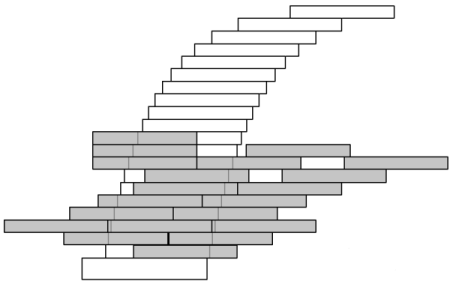
And to illustrate just why
Rcpp
is so cool for this, here is a little animation of a callback from the C++
code when doing the filtering on Adam's example 5.1. By passing a simple
plotting function, written in R, to the C++ code, we can get a plot updated
on every iteration. Here I cheated a little and used our old plot function
with fixed ranges, the package now uses a more general function:
The animation is of course due to ImageMagick glueing one hundred files into
a single animated gif.
More information about
RcppSMC is on its page,
and we intend to add more examples and extensions over time.
 If I'll make it through this week it's because of these special people in my life. They help me through thick and thin, they believe in me, they are there for me. There is one universal term for them, friends. The term in its real meaning, in its original meaning, not in the perverted sense that sites like Facebook want to make you believe that it's alright to apply to random bystanders. You won't go as far for those as you'd go for your true friends, so don't let them steal away the meaning of the word from you.
As music is one of the most driving force for me and this song makes me wanna cry, this is what I want to send out to my friends who are able to motivate me to keep me going:
If I'll make it through this week it's because of these special people in my life. They help me through thick and thin, they believe in me, they are there for me. There is one universal term for them, friends. The term in its real meaning, in its original meaning, not in the perverted sense that sites like Facebook want to make you believe that it's alright to apply to random bystanders. You won't go as far for those as you'd go for your true friends, so don't let them steal away the meaning of the word from you.
As music is one of the most driving force for me and this song makes me wanna cry, this is what I want to send out to my friends who are able to motivate me to keep me going: 

 I attended an interesting seminar on the
I attended an interesting seminar on the 
{kind=link}
{kind=link}
{kind=link}