
Narabu is a new intraframe video codec. You may or may not want to read
part 1
first.
The GPU, despite being extremely more flexible than it was fifteen years
ago, is still a very different beast from your CPU, and not all problems
map well to it performance-wise. Thus, before designing a codec, it's
useful to know what our platform looks like.
A GPU has lots of special functionality for graphics (well, duh), but we'll
be concentrating on the
compute shader subset in this context, ie., we
won't be drawing any polygons. Roughly, a GPU (as I understand it!) is built
up about as follows:
A GPU contains 1 20 cores; NVIDIA calls them SMs (shader multiprocessors),
Intel calls them subslices. (Trivia: A typical mid-range Intel GPU contains two cores,
and thus is designated GT2.) One such core usually runs the same program,
although on different data; there are exceptions, but typically, if your
program can't fill an entire core with parallelism, you're wasting energy.
Each core, in addition to tons (thousands!) of registers, also has some
shared memory (also called local memory sometimes, although that term
is overloaded), typically 32 64 kB, which you can think of in two ways:
Either as a sort-of explicit L1 cache, or as a way to communicate
internally on a core. Shared memory is a limited, precious resource in
many algorithms.
Each core/SM/subslice contains about 8 execution units (Intel
calls them EUs, NVIDIA/AMD calls them something else) and some memory
access logic. These multiplex a bunch of threads (say, 32) and run in
a round-robin-ish fashion. This means that a GPU can handle memory stalls
much better than a typical CPU, since it has so many streams to pick from;
even though each thread runs in-order, it can just kick off an operation
and then go to the next thread while the previous one is working.
Each execution unit has a bunch of ALUs (typically 16) and executes code in a SIMD
fashion. NVIDIA calls these ALUs CUDA cores , AMD calls them stream
processors . Unlike on CPU, this SIMD has full scatter/gather support
(although sequential access, especially in certain patterns, is
much more efficient
than random access), lane enable/disable so it can work with conditional
code, etc.. The typically fastest operation is a 32-bit float muladd;
usually that's single-cycle. GPUs
love 32-bit FP code. (In fact, in some
GPU languages, you won't even have 8-, 16-bit or 64-bit types. This is
annoying, but not the end of the world.)
The vectorization is not exposed to the user in typical code (GLSL has some
vector types, but they're usually just broken up into scalars, so that's a
red herring), although in some programming languages you can get to swizzle
the SIMD stuff internally to gain advantage of that (there's also schemes for
broadcasting bits by voting etc.). However, it is crucially important to
performance; if you have divergence within a warp, this means the GPU needs
to execute both sides of the if. So less divergent code is good.
Such a SIMD group is called a warp by NVIDIA (I don't know if the others have
names for it). NVIDIA has SIMD/warp width always 32; AMD used to be 64 but
is now 16. Intel supports 4 32 (the compiler will autoselect based on a bunch of
factors), although 16 is the most common.
The upshot of all of this is that you need massive amounts of parallelism
to be able to get useful performance out of a CPU. A rule of thumb is that
if you could have launched about a thousand threads for your problem on CPU,
it's a good fit for a GPU, although this is of course just a guideline.
There's a ton of APIs available to write compute shaders. There's CUDA (NVIDIA-only, but the
dominant player), D3D compute (Windows-only, but multi-vendor),
OpenCL (multi-vendor, but highly variable implementation quality),
OpenGL compute shaders (all platforms except macOS, which has too old drivers),
Metal (Apple-only) and probably some that I forgot. I've chosen to go for
OpenGL compute shaders since I already use OpenGL shaders a lot, and this
saves on interop issues. CUDA probably is more mature, but my laptop is
Intel. :-) No matter which one you choose, the programming model looks very
roughly like this pseudocode:
for (size_t workgroup_idx = 0; workgroup_idx < NUM_WORKGROUPS; ++workgroup_idx) // in parallel over cores
char shared_mem[REQUESTED_SHARED_MEM]; // private for each workgroup
for (size_t local_idx = 0; local_idx < WORKGROUP_SIZE; ++local_idx) // in parallel on each core
main(workgroup_idx, local_idx, shared_mem);
except in reality, the indices will be split in x/y/z for your convenience
(you control all six dimensions, of course), and if you haven't asked for too
much shared memory, the driver can silently make larger workgroups if it
helps increase parallelity (this is totally transparent to you). main()
doesn't return anything, but you can do reads and writes as you wish;
GPUs have large amounts of memory these days, and staggering amounts of
memory bandwidth.
Now for the bad part: Generally, you will have no debuggers, no way of
logging and no real profilers (if you're lucky, you can get to know how long
each compute shader invocation takes, but not what takes time within the
shader itself). Especially the latter is maddening; the only real recourse
you have is some timers, and then placing timer probes or trying to comment
out sections of your code to see if something goes faster. If you don't
get the answers you're looking for, forget printf you need to set up a
separate buffer, write some numbers into it and pull that buffer down to
the GPU. Profilers are an essential part of optimization, and I had really
hoped the world would be more mature here by now. Even CUDA doesn't give
you all that much insight sometimes I wonder if all of this is because
GPU drivers and architectures are
meant to be shrouded in mystery for
competitiveness reasons, but I'm honestly not sure.
So that's it for a crash course in GPU architecture. Next time, we'll start
looking at the Narabu codec itself.
 I've finally landed a patch/feature for HLedger I've been working on-and-off
(mostly off) since around March.
HLedger has a powerful CSV importer which you configure with a set of rules.
Rules consist of conditional matchers (does field X in this CSV row match
this regular expression?) and field assignments (set the resulting
transaction's account to Y).
motivating problem 1
Here's an example of one of my rules for handling credit card repayments. This
rule is applied when I import a CSV for my current account, which pays the
credit card:
I've finally landed a patch/feature for HLedger I've been working on-and-off
(mostly off) since around March.
HLedger has a powerful CSV importer which you configure with a set of rules.
Rules consist of conditional matchers (does field X in this CSV row match
this regular expression?) and field assignments (set the resulting
transaction's account to Y).
motivating problem 1
Here's an example of one of my rules for handling credit card repayments. This
rule is applied when I import a CSV for my current account, which pays the
credit card:






 Back in June 2018,
Back in June 2018,  So This is basically a call for adoption for the Raspberry Debian images
building service. I do intend to stick around and try to help. It s not only me
(although I m responsible for the build itself) we have a nice and healthy
group of Debian people hanging out in the
So This is basically a call for adoption for the Raspberry Debian images
building service. I do intend to stick around and try to help. It s not only me
(although I m responsible for the build itself) we have a nice and healthy
group of Debian people hanging out in the 


















 I've been a fan of the products manufactured by
I've been a fan of the products manufactured by  This was my first time working with aluminium frame extrusions and I had tons
of fun! I specced the first version using
This was my first time working with aluminium frame extrusions and I had tons
of fun! I specced the first version using  For the curious ones, the cabling is done this way:
For the curious ones, the cabling is done this way:






 More than a month has passed since the last update of TeX Live packages in Debian, so here is a new checkout!
More than a month has passed since the last update of TeX Live packages in Debian, so here is a new checkout! All arch all packages have been updated to the tlnet state as of 2020-06-29, see the detailed update list below.
Enjoy.
New packages
All arch all packages have been updated to the tlnet state as of 2020-06-29, see the detailed update list below.
Enjoy.
New packages
 My favorite this time is
My favorite this time is 





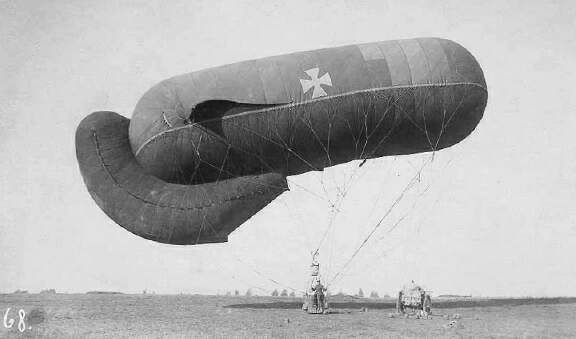 Over a hundred years ago, Russian leaders proposed a treaty
Over a hundred years ago, Russian leaders proposed a treaty {kind=link}