Recently I completed a small project, including an embedded microcontroller. For me, using the popular Arduino IDE, and C, was a mistake. The experience with Rust was better, but still very exciting, and not in a good way.
Here follows the rant.
Introduction
In a recent project (I ll write about the purpose, and the hardware in another post) I chose to use a
DigiSpark board. This is a small board with a USB-A tongue (but not a proper plug), and an
ATTiny85 microcontroller, This chip has 8 pins and is quite small really, but it was plenty for my application. By choosing something popular, I hoped for convenient hardware, and an uncomplicated experience.
Convenient hardware, I got.
Arduino IDE
The usual way to program these boards is via an IDE. I thought I d go with the flow and try that. I knew these were closely related to actual Arduinos and saw that the IDE package
arduino was in Debian.
But it turns out that the Debian package s version doesn t support the DigiSpark. (AFAICT from the list it offered me, I m not sure it supports
any ATTiny85 board.) Also, disturbingly, its board manager seemed to be offering to install board support, suggesting it would download stuff from the internet and run it. That wouldn t be acceptable for my main laptop.
I didn t expect to be doing much programming or debugging, and the project didn t have significant security requirements: the chip, in my circuit, has only a very narrow ability do anything to the real world, and no network connection of any kind. So I thought it would be tolerable to do the project on my low-security video laptop . That s the machine where I m prepared to say yes to installing random software off the internet.
So I went to the
upstream Arduino site and downloaded a tarball containing the Arduino IDE. After unpacking that in
/opt it ran and produced a pointy-clicky IDE, as expected. I had already found
a 3rd-party tutorial saying I needed to add a magic URL (from the DigiSpark s vendor) in the preferences. That indeed allowed it to download a whole pile of stuff. Compilers, bootloader clients, god knows what.
However, my tiny test program didn t make it to the board. Half-buried in a too-small window was an error message about the board s bootloader ( Micronucleus ) being too new.
The boards I had came pre-flashed with micronucleus 2.2. Which is hardly new, But even so the official Arduino IDE (or maybe the DigiSpark s board package?) still contains an old version. So now we have all the downsides of
curl bash-ware, but we re lacking the it s up to date and it just works upsides.
Further digging found some
random forum posts which suggested simply downloading
a newer micronucleus and manually stuffing it into the right place: one overwrites a specific file, in the middle the heaps of stuff that the Arduino IDE s board support downloader squirrels away in your home directory. (In my case, the home directory of the untrusted shared user on the video laptop,)
So, whatever . I did that. And it worked!
Having demo d my ability to run code on the board, I set about writing my program.
Writing C again
The programming language offered via the Arduino IDE is C.
It s been a little while since I started a new thing in C. After having spent so much of the last several years writing Rust. C s primitiveness quickly started to grate, and the program couldn t easily be as DRY as I wanted (Don t Repeat Yourself, see
Wilson et al, 2012, 4, p.6). But, I carried on; after all, this was going to be quite a small job.
Soon enough I had a program that looked right and compiled.
Before testing it in circuit, I wanted to do some QA. So I wrote a simulator harness that
#included my Arduino source file, and provided imitations of the few Arduino library calls my program used. As an side advantage, I could build and run the simulation on my main machine, in my normal development environment (Emacs,
make, etc.). The simulator runs confirmed the correct behaviour. (Perhaps there would have been some more faithful simulation tool, but the Arduino IDE didn t seem to offer it, and I wasn t inclined to go further down that kind of path.)
So I got the video laptop out, and used the Arduino IDE to flash the program. It didn t run properly. It hung almost immediately. Some very ad-hoc debugging via led-blinking (like printf debugging, only much worse) convinced me that my problem was as follows:
Arduino C has 16-bit ints. My test harness was on my 64-bit Linux machine. C was autoconverting things (when building for the micrcocontroller). The way the Arduino IDE ran the compiler didn t pass the warning options necessary to spot narrowing implicit conversions. Those warnings aren t the default in C in general
because C compilers hate us all for compatibility reasons.
I don t know why those warnings are not the default in the Arduino IDE, but my guess is that they didn t want to bother poor novice programmers with messages from the compiler explaining how their program is quite possibly wrong. After all, users don t like error messages so we shouldn t report errors. And novice programmers are especially fazed by error messages so it s better to just let them struggle themselves with the arcane mysteries of undefined behaviour in C?
The Arduino IDE does offer a dropdown for compiler warnings . The default is None. Setting it to All didn t produce anything about my integer overflow bugs. And, the output was very hard to find anyway because the log window has a constant stream of strange messages from
javax.jmdns, with hex DNS packet dumps. WTF.
Other things that were vexing about the Arduino IDE: it has fairly fixed notions (which don t seem to be documented) about how your files and directories ought to be laid out, and magical machinery for finding things you put nearby its sketch (as it calls them) and sticking them in its ear, causing lossage. It has a tendency to become confused if you edit files under its feet (e.g. with
git checkout). It wasn t really very suited to a workflow where principal development occurs elsewhere.
And, important settings such as the project s clock speed, or even the target board, or
the compiler warning settings to use weren t stored in the project directory along with the actual code. I didn t look too hard, but I presume they must be in a dotfile somewhere. This is madness.
Apparently there is an Arduino CLI too. But I was already quite exasperated, and I didn t like the idea of going so far off the beaten path, when the whole point of using all this was to stay with popular tooling and share fate with others. (How do these others cope? I have no idea.)
As for the integer overflow bug:
I didn t seriously consider trying to figure out how to control in detail the C compiler options passed by the Arduino IDE. (Perhaps this is
possible, but not really documented?) I did consider trying to run a cross-compiler myself from the command line, with appropriate warning options, but that would have involved providing (or stubbing, again) the Arduino/DigiSpark libraries (and bugs could easily lurk at that interface).
Instead, I thought, if only I had written the thing in Rust . But that wasn t possible, was it? Does Rust even support this board?
Rust on the DigiSpark
I did a cursory web search and found a very useful
blog post by Dylan Garrett.
This encouraged me to think it might be a workable strategy. I looked at the instructions there. It seemed like I could run them via the
privsep arrangement I use to protect myself when developing using upstream cargo packages from
crates.io.
I got surprisingly far surprisingly quickly. It did, rather startlingly, cause my
rustup to download a random recent Nightly Rust, but I have six of those already for other Reasons. Very quickly I got the trinket LED blink example, referenced by Dylan s blog post, to compile. Manually copying the file to the video laptop allowed me to run the previously-downloaded micronucleus executable and successfully run the blink example on my board!
I thought a more principled approach to the bootloader client might allow a more convenient workflow. I found the
upstream Micronucleus git releases and tags, and had a look over its source code, release dates, etc. It seemed plausible, so I compiled v2.6 from source. That was a success: now I could build and install a Rust program onto my board, from the command line, on my main machine. No more pratting about with the video laptop.
I had got further, more quickly, with Rust, than with the Arduino IDE, and the outcome and workflow was superior.
So, basking in my success, I copied the directory containing the example into my own project, renamed it, and adjusted the
path references.
That didn t work. Now it didn t build. Even after I copied about
.cargo/config.toml and
rust-toolchain.toml it didn t build, producing a variety of exciting messages, depending what precisely I tried. I don t have detailed logs of my flailing: the instructions say to build it by
cd ing to the subdirectory, and, given that what I was trying to do was to
not follow those instructions, it didn t seem sensible to try to prepare a proper repro so I could file a ticket. I wasn t optimistic about investigating it more deeply myself: I have some experience of fighting cargo, and it s not usually fun. Looking at some of the build control files, things seemed quite complicated.
Additionally, not all of the crates are on
crates.io. I have no idea why not. So, I would need to supply local copies of them anyway. I decided to just
git subtree add the
avr-hal git tree.
(That seemed better than the approach taken by the avr-hal project s
cargo template, since that template involve a cargo dependency on a foreign
git repository. Perhaps it would be possible to turn them into
path dependencies, but given that I had evidence of file-location-sensitive behaviour, which I didn t feel like I wanted to spend time investigating, using that seems like it would possibly have invited more trouble. Also, I don t like package templates very much. They re a form of clone-and-hack: you end up stuck with whatever bugs or oddities exist in the version of the template which was current when you started.)
Since I couldn t get things to build outside
avr-hal, I edited the example, within
avr-hal, to refer to my (one)
program.rs file
outside avr-hal, with a
#[path] instruction. That s not pretty, but it worked.
I also had to write a
nasty shell script to work around the lack of good support in my
nailing-cargo privsep tool for builds where
cargo must be invoked in a deep subdirectory, and/or
Cargo.lock isn t where it expects, and/or the
target directory containing build products is in a weird place. It also has to filter the output from
cargo to adjust the pathnames in the error messages. Otherwise, running both
cd A; cargo build and
cd B; cargo build from a
Makefile produces confusing sets of error messages, some of which contain filenames relative to
A and some relative to
B, making it impossible for my Emacs to reliably find the right file.
RIIR (Rewrite It In Rust)
Having got my build tooling sorted out I could go back to my actual program.
I translated the main program, and the simulator, from C to Rust, more or less line-by-line. I made the Rust version of the simulator produce the same output format as the C one. That let me check that the two programs had the same (simulated) behaviour. Which they did (after fixing a few glitches in the simulator log formatting).
Emboldened, I flashed the Rust version of my program to the DigiSpark. It worked right away!
RIIR had caused the bug to vanish. Of course, to rewrite the program in Rust, and get it to compile, it was necessary to be careful about the types of all the various integers, so that s not so surprising. Indeed, it was the point. I was then able to refactor the program to be a bit more natural and DRY, and improve some internal interfaces. Rust s greater power, compared to C, made those cleanups easier, so making them worthwhile.
However, when doing real-world testing I found a weird problem: my timings were off. Measured, the real program was too fast by a factor of slightly more than 2. A bit of searching (and searching my memory) revealed the cause: I was using a board template for an Adafruit Trinket. The Trinket has a clock speed of 8MHz. But the DigiSpark runs at 16.5MHz. (This is discussed in a
ticket against one of the C/C++ libraries supporting the ATTiny85 chip.)
The Arduino IDE had offered me a choice of clock speeds. I have no idea how that dropdown menu took effect; I suspect it was adding prelude code to adjust the clock prescaler. But my attempts to mess with the CPU clock prescaler register by hand at the start of my Rust program didn t bear fruit.
So instead, I adopted a bodge: since my code has (for code structure reasons, amongst others) only one place where it dealt with the underlying hardware s notion of time, I simply changed my
delay function to
adjust the passed-in delay values, compensating for the wrong clock speed.
There was probably a more principled way. For example I could have (re)based my work on either of the two
unmerged open MRs which added proper support for the DigiSpark board, rather than abusing the Adafruit Trinket definition. But, having a nearly-working setup, and an explanation for the behaviour, I preferred the narrower fix to reopening any cans of worms.
An offer of help
As will be obvious from this posting, I m not an expert in dev tools for embedded systems. Far from it. This area seems like quite a deep swamp, and I m probably not the person to help drain it. (Frankly, much of the improvement work ought to be done, and paid for, by hardware vendors.)
But, as a full Member of the Debian Project, I have considerable gatekeeping authority there. I also have much experience of software packaging, build systems, and release management. If anyone wants to try to improve the situation with embedded tooling in Debian, and is willing to do the actual packaging work. I would be happy to advise, and to review and sponsor your contributions.
An obvious candidate: it seems to me that
micronucleus could easily be in Debian. Possibly a DigiSpark board definition could be provided to go with the
arduino package.
Unfortunately, IMO Debian s Rust packaging tooling and workflows are very poor, and the first of my
suggestions for improvement wasn t well received. So if you need help with improving Rust packages in Debian, please talk to the
Debian Rust Team yourself.
Conclusions
Embedded programming is still rather a mess and probably always will be.
Embedded build systems can be bizarre. Documentation is scant. You re often expected to download board support packages full of mystery binaries, from the board vendor (or others).
Dev tooling is maddening, especially if aimed at novice programmers. You want version control? Hermetic tracking of your project s build and install configuration? Actually to be told by the compiler when you write obvious bugs? You re way off the beaten track.
As ever, Free Software is under-resourced and the maintainers are often busy, or (reasonably) have other things to do with their lives.
All is not lost
Rust can be a significantly better bet than C for embedded software:
The Rust compiler will catch a good proportion of programming errors, and an experienced Rust programmer can arrange (by suitable internal architecture) to catch nearly all of them. When writing for a chip in the middle of some circuit, where debugging involves staring an LED or a multimeter, that s precisely what you want.
Rust embedded dev tooling was, in this case, considerably better. Still quite chaotic and strange, and less mature, perhaps. But: significantly fewer mystery downloads, and significantly less crazy deviations from the language s normal build system. Overall, less bad software supply chain integrity.
The ATTiny85 chip, and the DigiSpark board, served my hardware needs very well. (More about the hardware aspects of this project in a future posting.)

comments
 Getting the Belgian eID to work on Linux
systems should be fairly easy, although some people do struggle with it.
For that reason, there is a lot of third-party documentation out there
in the form of blog posts, wiki pages, and other kinds of things.
Unfortunately, some of this documentation is simply wrong. Written by
people who played around with things until it kind of worked, sometimes
you get a situation where something that used to work in the past (but
wasn't really necessary) now stopped working, but it's still added to
a number of locations as though it were the gospel.
And then people follow these instructions and now things don't work
anymore.
One of these revolves around OpenSC.
OpenSC is an open source smartcard library that has support for a
pretty
large
number of smartcards, amongst which the Belgian eID. It provides a
PKCS#11 module as well as a
number of supporting tools.
For those not in the know, PKCS#11 is a standardized C API for
offloading cryptographic operations. It is an API that can be used when
talking to a hardware cryptographic module, in order to make that module
perform some actions, and it is especially popular in the open source
world, with support in
NSS,
amongst others. This library is written and maintained by mozilla, and
is a low-level cryptographic library that is used by Firefox (on all
platforms it supports) as well as by Google Chrome and other browsers
based on that (but only on Linux, and as I understand it, only for
linking with smartcards; their BoringSSL library is used for other
things).
The official eID software that we ship through
eid.belgium.be,
also known as "BeID", provides a PKCS#11 module for the Belgian eID, as
well as a number of support tools to make interacting with the card
easier, such as the "eID viewer", which provides the ability to read
data from the card, and validate their signatures. While the very first
public version of this eID PKCS#11 module was originally based on
OpenSC, it has since been reimplemented as a PKCS#11 module in its own
right, with no lineage to OpenSC whatsoever anymore.
About five years ago, the Belgian eID card was renewed. At the time, a
new physical appearance was the most obvious difference with the old
card, but there were also some technical, on-chip, differences that are
not so apparent. The most important one here, although it is not the
only one, is the fact that newer eID cards now use a NIST
P-384 elliptic curve-based private
keys, rather than the RSA-based
ones that were used in the past. This change required some changes to
any PKCS#11 module that supports the eID; both the BeID one, as well as
the OpenSC card-belpic driver that is written in support of the Belgian
eID.
Obviously, the required changes were implemented for the BeID module;
however, the OpenSC card-belpic driver was not updated. While I did do
some preliminary work on the required changes, I was unable to get it to
work, and eventually other things took up my time so I never finished
the implementation. If someone would like to finish the work that I
started, the preliminal patch that I
wrote
could be a good start -- but like I said, it doesn't yet work. Also,
you'll probably be interested in the official
documentation
of the eID card.
Unfortunately, in the mean time someone added the Applet 1.8 ATR to the
card-belpic.c file, without also implementing the required changes to
the driver so that the PKCS#11 driver actually supports the eID card.
The result of this is that if you have OpenSC installed in NSS for
either Firefox or any Chromium-based browser, and it gets picked up
before the BeID PKCS#11 module, then NSS will stop looking and pass all
crypto operations to the OpenSC PKCS#11 module rather than to the
official eID PKCS#11 module, and things will not work at all, causing a
lot of confusion.
I have therefore taken the following two steps:
Getting the Belgian eID to work on Linux
systems should be fairly easy, although some people do struggle with it.
For that reason, there is a lot of third-party documentation out there
in the form of blog posts, wiki pages, and other kinds of things.
Unfortunately, some of this documentation is simply wrong. Written by
people who played around with things until it kind of worked, sometimes
you get a situation where something that used to work in the past (but
wasn't really necessary) now stopped working, but it's still added to
a number of locations as though it were the gospel.
And then people follow these instructions and now things don't work
anymore.
One of these revolves around OpenSC.
OpenSC is an open source smartcard library that has support for a
pretty
large
number of smartcards, amongst which the Belgian eID. It provides a
PKCS#11 module as well as a
number of supporting tools.
For those not in the know, PKCS#11 is a standardized C API for
offloading cryptographic operations. It is an API that can be used when
talking to a hardware cryptographic module, in order to make that module
perform some actions, and it is especially popular in the open source
world, with support in
NSS,
amongst others. This library is written and maintained by mozilla, and
is a low-level cryptographic library that is used by Firefox (on all
platforms it supports) as well as by Google Chrome and other browsers
based on that (but only on Linux, and as I understand it, only for
linking with smartcards; their BoringSSL library is used for other
things).
The official eID software that we ship through
eid.belgium.be,
also known as "BeID", provides a PKCS#11 module for the Belgian eID, as
well as a number of support tools to make interacting with the card
easier, such as the "eID viewer", which provides the ability to read
data from the card, and validate their signatures. While the very first
public version of this eID PKCS#11 module was originally based on
OpenSC, it has since been reimplemented as a PKCS#11 module in its own
right, with no lineage to OpenSC whatsoever anymore.
About five years ago, the Belgian eID card was renewed. At the time, a
new physical appearance was the most obvious difference with the old
card, but there were also some technical, on-chip, differences that are
not so apparent. The most important one here, although it is not the
only one, is the fact that newer eID cards now use a NIST
P-384 elliptic curve-based private
keys, rather than the RSA-based
ones that were used in the past. This change required some changes to
any PKCS#11 module that supports the eID; both the BeID one, as well as
the OpenSC card-belpic driver that is written in support of the Belgian
eID.
Obviously, the required changes were implemented for the BeID module;
however, the OpenSC card-belpic driver was not updated. While I did do
some preliminary work on the required changes, I was unable to get it to
work, and eventually other things took up my time so I never finished
the implementation. If someone would like to finish the work that I
started, the preliminal patch that I
wrote
could be a good start -- but like I said, it doesn't yet work. Also,
you'll probably be interested in the official
documentation
of the eID card.
Unfortunately, in the mean time someone added the Applet 1.8 ATR to the
card-belpic.c file, without also implementing the required changes to
the driver so that the PKCS#11 driver actually supports the eID card.
The result of this is that if you have OpenSC installed in NSS for
either Firefox or any Chromium-based browser, and it gets picked up
before the BeID PKCS#11 module, then NSS will stop looking and pass all
crypto operations to the OpenSC PKCS#11 module rather than to the
official eID PKCS#11 module, and things will not work at all, causing a
lot of confusion.
I have therefore taken the following two steps:
 This year was hard from a personal and work point of view, which impacted the amount of Free Software bits I ended up doing - even when I had the time I often wasn t in the right head space to make progress on things. However writing this annual recap up has been a useful exercise, as I achieved more than I realised. For previous years see
This year was hard from a personal and work point of view, which impacted the amount of Free Software bits I ended up doing - even when I had the time I often wasn t in the right head space to make progress on things. However writing this annual recap up has been a useful exercise, as I achieved more than I realised. For previous years see 


 There's a decent number of laptops with fingerprint readers that are supported by Linux, and Gnome has some nice integration to make use of that for authentication purposes. But if you log in with a fingerprint, the moment you start any app that wants to access stored passwords you'll get a prompt asking you to type in your password, which feels like it somewhat defeats the point. Mac users don't have this problem - authenticate with TouchID and all your passwords are available after login. Why the difference?
There's a decent number of laptops with fingerprint readers that are supported by Linux, and Gnome has some nice integration to make use of that for authentication purposes. But if you log in with a fingerprint, the moment you start any app that wants to access stored passwords you'll get a prompt asking you to type in your password, which feels like it somewhat defeats the point. Mac users don't have this problem - authenticate with TouchID and all your passwords are available after login. Why the difference? Dormitory room in Zostel Ernakulam, Kochi.
Dormitory room in Zostel Ernakulam, Kochi.
 Beds in Zostel Ernakulam, Kochi.
Beds in Zostel Ernakulam, Kochi.
 Onam sadya menu from Brindhavan restaurant.
Onam sadya menu from Brindhavan restaurant.
 Sadya lined up for serving
Sadya lined up for serving
 Sadya thali served on banana leaf.
Sadya thali served on banana leaf.
 We were treated with such views during the Wayanad trip.
We were treated with such views during the Wayanad trip.
 A road in Rippon.
A road in Rippon.
 Entry to Kanthanpara Falls.
Entry to Kanthanpara Falls.
 Kanthanpara Falls.
Kanthanpara Falls.
 A view of Zostel Wayanad.
A view of Zostel Wayanad.
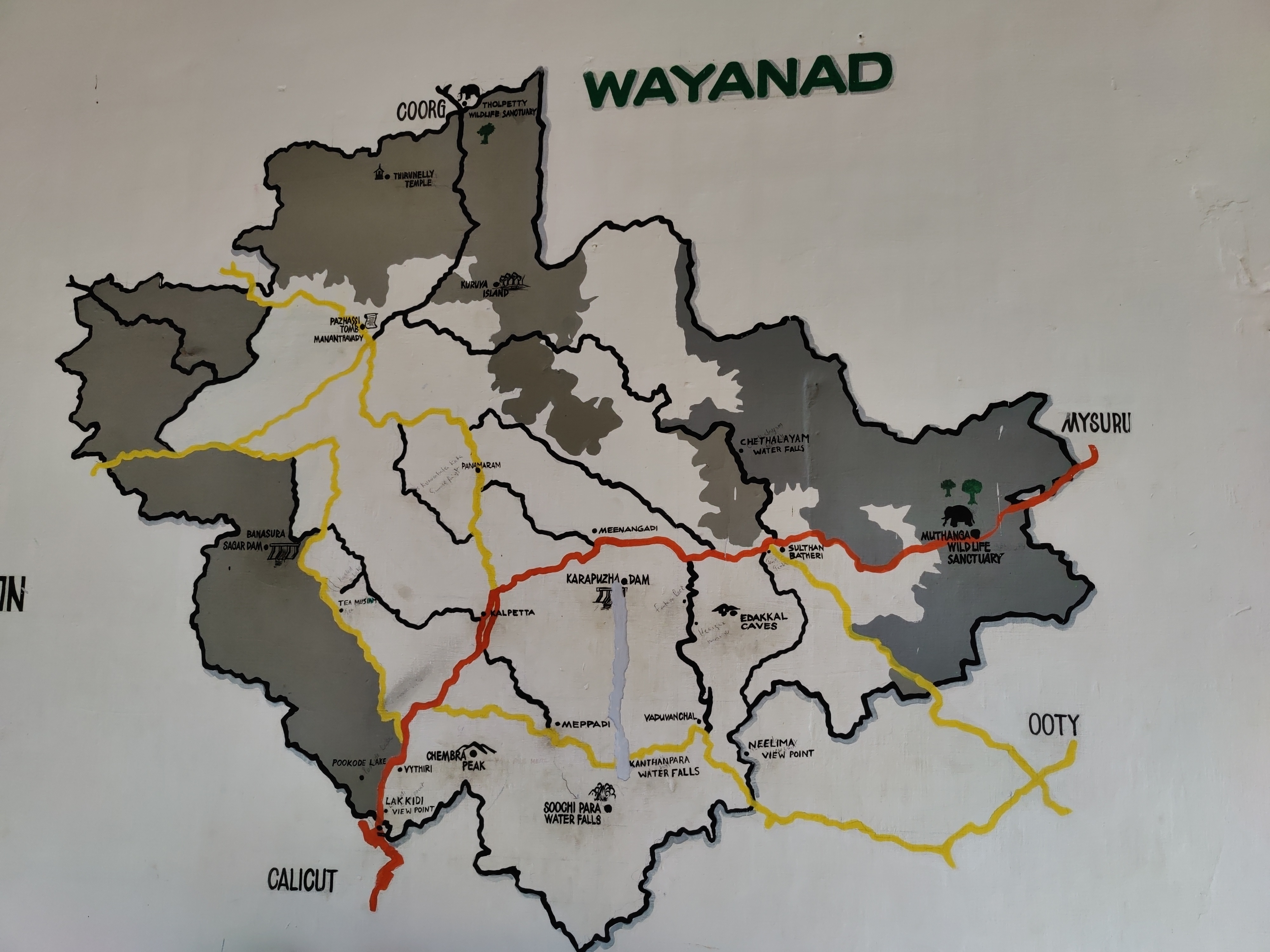 A map of Wayanad showing tourist places.
A map of Wayanad showing tourist places.
 A view from inside the Zostel Wayanad property.
A view from inside the Zostel Wayanad property.
 Terrain during trekking towards the Chembra peak.
Terrain during trekking towards the Chembra peak.
 Heart-shaped lake at the Chembra peak.
Heart-shaped lake at the Chembra peak.
 Me at the heart-shaped lake.
Me at the heart-shaped lake.
 Views from the top of the Chembra peak.
Views from the top of the Chembra peak.
 View of another peak from the heart-shaped lake.
View of another peak from the heart-shaped lake.

 QNAP TS-453mini product photo
QNAP TS-453mini product photo The logo for QNAP HappyGet 2 and Blizzard s StarCraft 2 side by side
The logo for QNAP HappyGet 2 and Blizzard s StarCraft 2 side by side Thermalright AXP120-X67, AMD Ryzen 5 PRO 5650GE, ASRock Rack X570D4I-2T, all assembled and running on a flat surface
Thermalright AXP120-X67, AMD Ryzen 5 PRO 5650GE, ASRock Rack X570D4I-2T, all assembled and running on a flat surface Memtest86 showing test progress, taken from IPMI remote control window
Memtest86 showing test progress, taken from IPMI remote control window Screenshot of PCIe 16x slot bifurcation options in UEFI settings, taken from IPMI remote control window
Screenshot of PCIe 16x slot bifurcation options in UEFI settings, taken from IPMI remote control window Internal image of Silverstone CS280 NAS build. Image stolen from
Internal image of Silverstone CS280 NAS build. Image stolen from  Internal image of Silverstone CS280 NAS build. Image stolen from
Internal image of Silverstone CS280 NAS build. Image stolen from  NAS build in Silverstone SUGO 14, mid build, panels removed
NAS build in Silverstone SUGO 14, mid build, panels removed Silverstone SUGO 14 from the front, with hot swap bay installed
Silverstone SUGO 14 from the front, with hot swap bay installed Storage SSD loaded into hot swap sled
Storage SSD loaded into hot swap sled TrueNAS Dashboard screenshot in browser window
TrueNAS Dashboard screenshot in browser window The final system, powered up
The final system, powered up
 There is a bit of context that needs to be shared before I get to this and would be a long one. For reasons known and unknown, I have a lot of sudden electricity outages. Not just me, all those who are on my line. A discussion with a lineman revealed that around 200+ families and businesses are on the same line and when for whatever reason the electricity goes for all. Even some of the traffic lights don t work. This affects software more than hardware or in some cases, both. And more specifically HDD s are vulnerable. I had bought an APC unit several years for precisely this, but over period of time it just couldn t function and trips also when the electricity goes out. It s been 6-7 years so can t even ask customer service to fix the issue and from whatever discussions I have had with APC personnel, the only meaningful difference is to buy a new unit but even then not sure this is an issue that can be resolved, even with that.
That comes to the issue that happens once in a while where the system fsck is unable to repair /home and you need to use an external pen drive for the same. This is my how my hdd stacks up
There is a bit of context that needs to be shared before I get to this and would be a long one. For reasons known and unknown, I have a lot of sudden electricity outages. Not just me, all those who are on my line. A discussion with a lineman revealed that around 200+ families and businesses are on the same line and when for whatever reason the electricity goes for all. Even some of the traffic lights don t work. This affects software more than hardware or in some cases, both. And more specifically HDD s are vulnerable. I had bought an APC unit several years for precisely this, but over period of time it just couldn t function and trips also when the electricity goes out. It s been 6-7 years so can t even ask customer service to fix the issue and from whatever discussions I have had with APC personnel, the only meaningful difference is to buy a new unit but even then not sure this is an issue that can be resolved, even with that.
That comes to the issue that happens once in a while where the system fsck is unable to repair /home and you need to use an external pen drive for the same. This is my how my hdd stacks up  The main argument as have shared before is that Indian Govt. thinks we need our home grown CPU and while I have no issues with that, as shared before except for RISC-V there is no other space where India could look into doing that. Especially after the Chip Act, Biden has made that any new fabs or any new thing in chip fabrication will only be shared with
The main argument as have shared before is that Indian Govt. thinks we need our home grown CPU and while I have no issues with that, as shared before except for RISC-V there is no other space where India could look into doing that. Especially after the Chip Act, Biden has made that any new fabs or any new thing in chip fabrication will only be shared with 
 . Backups certainly make a lot of sense, especially
. Backups certainly make a lot of sense, especially  After many years of effort, I am happy to announce that
After many years of effort, I am happy to announce that 





 I have had the pleasure to have Poha in many ways. One of my favorite ones is when people have actually put tadka on top of Poha. You do everything else but in a slight reverse order. The tadka has all the spices mixed and is concentrated and is put on top of Poha and then mixed. Done right, it tastes out of this world. For those who might not have had the Indian culinary experience, most of which is actually borrowed from the Mughals, you are in for a treat.
One of the other things I would suggest to people is to ask people where there can get five types of rice. This is a specialty of South India and a sort of street food. I know where you can get it Hyderabad, Bangalore, Chennai but not in Kerala, although am dead sure there is, just somehow have missed it. If asked, am sure the Kerala team should be able to guide.
That s all for now, feeling hungry, having dinner as have been sharing about cooking.
I have had the pleasure to have Poha in many ways. One of my favorite ones is when people have actually put tadka on top of Poha. You do everything else but in a slight reverse order. The tadka has all the spices mixed and is concentrated and is put on top of Poha and then mixed. Done right, it tastes out of this world. For those who might not have had the Indian culinary experience, most of which is actually borrowed from the Mughals, you are in for a treat.
One of the other things I would suggest to people is to ask people where there can get five types of rice. This is a specialty of South India and a sort of street food. I know where you can get it Hyderabad, Bangalore, Chennai but not in Kerala, although am dead sure there is, just somehow have missed it. If asked, am sure the Kerala team should be able to guide.
That s all for now, feeling hungry, having dinner as have been sharing about cooking.