There s a lot of discussion / moaning /arguing at this time, so I thought I d post something about how LAVA got into Debian Jessie, the work involved and the lessons I ve learnt. Hopefully, it will help someone avoid the disappointment of having their package missing the migration into a future stable release. This was going to be a talk at the Minidebconf-uk in Cambridge but I decided to put this out as a permanent blog entry in the hope that it will be a useful reference for the future, not just Jessie.
Context
LAVA relies on a number of dependencies which were at the time all this started NEW to Debian as well as many others already in Debian. I d been running LAVA using packages on my own system for a few months before the packages were ready for use on the main servers (I never actually installed LAVA using the old virtualenv method on my own systems, except in a VM). I did do quite a lot of this on my own but I also had a team supporting the effort and valuing the benefits of moving to a packaged system.
At the time, LAVA was based on Ubuntu (12.04 LTS Precise Pangolin) and a new Ubuntu LTS was close (Trusty Tahr 14.04) but I started work on this in 2013. By the time my packages were ready for general usage, it was winter 2013 and much too close to get anything into Ubuntu in time for Trusty. So I started a local repo using space provided by Linaro. At the same time, I started uploading the dependencies to Debian. json-schema-validator, django-testscenarios and others arrived in April and May 2014. (Trusty was released in April). LAVA arrived in NEW in May, being accepted into unstable at the end of June. LAVA arrived in testing for the first time in July 2014.
Upstream development continued apace and a regular monthly upload, with some hotfixes in between, continued until close to the freeze.
At this point, note that although upstream is a medium sized team, the Debian packaging also has a team but all the uploads were made by me. I planned ahead. I knew that I would be going to Macau for Linaro Connect in February a critical stage in the finalisation of the packages and the migration of existing instances from the old methods. I knew that I would be on vacation from August through to the end of September 2014 including at least two weeks with absolutely no connectivity of any kind.
Right at this time, Django1.7 arrived in experimental with the intent to go into unstable and hence into Jessie. This was a headache for me, I initially sought to delay the migration until after Jessie. However, we discussed it upstream, allocated time within the busy schedule and also sought help from within Debian with the RFH tag. Rapha l Hertzog contributed patches for django1.7 support and we worked on those patches upstream, once I was back from vacation. (The final week of my vacation was a work conference, so we had everyone together at one hacking table.)
Still there was more to do, the django1.7 patches allowed the unit tests to complete but broke other parts of the lava-server package and needed subsequent tweaks and fixes.
Even with all this, the auto-removal from testing for packages affected by RC bugs in their dependencies became very important to monitor (it still is). It would be useful if some packages had less complex dependency chains (I m looking at you, uwsgi) as the auto-removal also covers build-depends. This led to some more headaches with libmatheval. I m not good with functional programming languages, I did have some exposure to Scheme when working on Gnucash upstream but it wasn t pleasant. The thought of fixing a scheme problem in the test suite of libmatheval was daunting. Again though, asking for help, I found people in the upstream team who wanted to refresh their use of scheme and were able to help out. The fix migrated into testing in October.
Just for added complications, lava-server gained a few RC bugs of it s own during that time too fixed upstream but awkward nonetheless.
Achievement unlocked
So that s how a complex package like lava-server gets into stable. With a lot of help. The main problem with top-level packages like this is the sheer weight of the dependency chain. Something seemingly unrelated (like libmatheval) can seriously derail the migrations. The package doesn t use the matheval support provided by uwsgi. The bug in matheval wasn t in the parts of matheval used by uwsgi. It wasn t in a language I am at all comfortable in fixing but it s my name on the changelog of the NMU. That happened because I asked for help. OK, when django1.7 was scheduled to arrive in Debian unstable and I knew that lava was not ready, I reacted out of fear and anxiety. However, I sought help, help was provided and that help was enough to get upstream to a point where the side-effects of the required changes could be fixed.
Maintaining a top-level package in Debian is becoming more like maintaining a core package in Debian and that is a good thing. When your package has a lot of dependencies, those dependencies become part of the maintenance workload of your package. It doesn t matter if those are install time dependencies, build dependencies or reverse dependencies. It doesn t actually matter if the issues in those packages are in languages you would personally wish to be expunged from the archive. It becomes your problem but not yours alone.
Debian has a lot of flames right now and Enrico encouraged us to look at what else is actually happening in Debian besides those arguments. Well, on top of all this with lava, I also did what I could to help the arm64 port along and I m very happy that this has been accepted into Jessie as an official release architecture. That s a much bigger story than LAVA yet LAVA was and remains instrumental in how arm64 gained the support in the kernel and various upstreams which allowed patches to be accepted and fixes to be incorporated into Debian packages.
So a roll call of helpers who may otherwise not have been recognised via changelogs, in no particular order:
- Steve McIntyre (Debian & Linaro)
- Rapha l Hertzog (Debian)
- Dave Pigott (Linaro)
- R mi Duraffort (Linaro)
- Sjoerd Simons (Debian)
- Antonio Terceiro (Debian and formerly Linaro)
- Martin Pitt (Debian)
- Jordi Mallach (Debian)
- Hector Oron (Debian)
- Colin Watson (Debian)
Also general thanks to the Debian FTP and Release teams.
Lessons learnt
- Allow time! None of the deadlines or timings involved in this entire process were hidden or unexpected. NEW always takes a finite but fairly lengthy amount of time but that was the only timeframe with any amount of uncertainty. That is actually a benefit it reminds you that this entire process is going to take a significant amount of time and the only loser if you try to rush it is going to be you and your package. Plan for the time and be sceptical about how much time is actually required.
- Ask for help! Everyone in Debian is a volunteer. Yes, the upstream for this project is a team of developers paid to work on this code (and largely only this code) but the upstream also has priorities, requirements, objectives and deadlines. It s no good expecting upstream to do everything. It s no good leaving upstream insufficient time to fit the required work into the existing upstream schedules. So ask for help within upstream and within Debian ask for help wherever you can. You don t know who may be able to help you until you ask. Be clear when asking for help how would someone test their proposed fix? Exactly what are you asking for help doing? (Hint: everything is not a good answer.)
- Keep on top of announcements and changes. The release team in Debian have made the timetable strict and have published regular updates, guidelines and status notes. As maintainer, it is your responsibility to keep up with those changes and make others in the upstream team aware of the changes and the implications. Upstream will rely on you to provide accurate information about these requirements. This is almost more important than actually providing the uploads or fixes. Without keeping people informed, even asking for help can turn out to be counter-productive. Communicate within Debian too talk to the teams, send status updates to bugs (even if the status is tag 123456 + help).
- Be realistic! Life happens around us, things change, personal timetables get torn up. Time for voluntary activity can appear and disappear (it tends to disappear far more often than extends, so take that into account too).
- Do not expect others to do the work for you asking for help is one thing, leaving the work to others is quite another. No complaining to the release team that they are blocking your work and avoid pleading or arguing when a decision is made. The policies and procedures within Debian are generally clear and there are quite enough arguments without adding more. Read the policies, read the guidelines, watch how other packages and other maintainers are handled and avoid those mistakes. Make it easy for others to help deliver what you want.
- Get to know your dependency chain follow the links on the packages.debian.org pages and get a handle on which packages are relevant to your package. Subscribe to the bug pages for some of the more high-risk packages. There are tools to help.
rc-alert can help you spot problems with runtime dependencies (you do have your own package installed on a system running unstable if not, get that running NOW). Watching build-dependencies is more difficult, especially build-dependencies of a runtime dependency, so watch the RC bug lists for packages in your dependency chain.
Above all else, remember why you and upstream want the packages in Debian in the first place. Debian is a respected distribution and has an acknowledged reputation for stability and portability. The very qualities that you and your upstream desire from having your package in Debian have direct implications for the amount of work and the amount of time that will be required to get your packages into Debian and keep them there. Having your package in Debian will bring considerable benefits but you will be required to invest a considerable amount of time. It is this contribution which is valuable to Debian and it is this work which will deliver the benefits you seek.
Being an expert in the one package is wildly inadequate. Debian is about the system, the whole distribution and sooner or later, you as the maintainer will be absolutely required to handle something which is so far out of your comfort zone it s untrue. The reality is that you are not expected to fix that problem you are expected to handle that problem and that includes seeking and acknowledging the help of others.
The story isn t over until release day. Having your package in testing the day before the freeze is one step. It may be a large step, but it is only one. The status of that package still needs monitoring. That long dependency chain can still come back and bite.
Don t wait for problems to surprise you.
Finally
One thing I do ask is that other upstream teams and maintainers think about the dependency chain they are creating. It may sound nice to have bindings for every interpreted language possible when releasing your compiled library but it does not help people using that library. Yes, it is more work releasing the bindings separately because a stable API is going to be needed to allow version 1.2.3 to work alongside 1.2.2 and 1.3.0 or the entire effort is pointless. Consider how your upstream package migrates. Consider how adding yet another build-dependency for an optional component makes things exponentially harder for those who need to rely on that upstream. If it is truly optional, release it separately and keep backwards compatibility on each side. It is more work but in reality, all that is happening is that the work is being transferred from the distribution (where it helps only that one distribution and causes duplication into other distributions) into the upstream (where it helps all distributions). Think carefully about what constitutes core functionality and release the rest separately.
Combining bindings for php, ruby, python, java, lua and xslt into a single upstream release tarball is a complete nonsense. It simply means that the package gets blocked from new uploads by the constant churn of being involved in every transition that occurs in the distribution. There is a very real risk that the package will miss a stable release simply by having fingers in too many pies. That hurts not only this upstream but every upstream trying to use any part of your code. Every developer likes to think that people are using and benefiting from their effort. It s not nice to directly harm the interests of other developers trying to use your code. It is not enough for the binary packages to be discrete migrations happen by source package and the released tarball needs to not include the optional bindings. It must be this way because it is the source package which determines whether version 1.2.3 of plugin foo can work with version 1.2.0 of the library as well as with version 1.3.0.
Maintainers regularly deal with these issues so talk to your upstream teams and explain why this is important to that particular team. Help other maintainers use your code and help make it easier to make a stable release of Debian. The quicker the freeze & release process becomes, the quicker new upstream versions can be uploaded and backported.
 Debian has recently received a donation of 8 build machines from Marvell. The new machines come with
Debian has recently received a donation of 8 build machines from Marvell. The new machines come with 

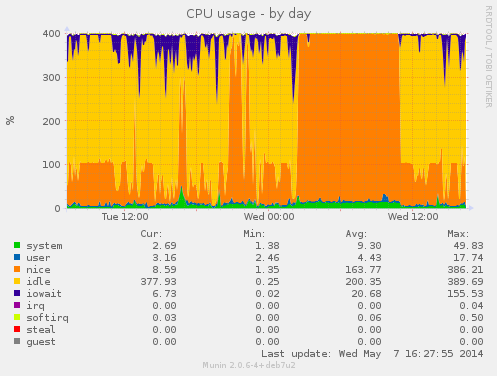 During this buildd cpu usage graph, we see most time only one CPU is consumed. So for fast package build times.. make sure your packages supports parallel building. For developers, abel.debian.org is porter machine with Armada XP. It has schroot's for both armel and armhf. set "DEB_BUILD_OPTIONS=parallel=4" and off you go. Finally I'd like to thank Thomas Petazzoni, Maen Suleiman, Hector Oron, Steve McIntyre, Adam Conrad and Jon Ward for making the upgrade happen. Meanwhile, we have unrelated trouble - a bunch of disks have broken within a few days apart. I take the warranty just run out... [1] only from Linux's point of view. - mv78200 has actually 2 cores, just not SMP or coherent. You could run an RTOS on the other core while you run Linux on the other.
During this buildd cpu usage graph, we see most time only one CPU is consumed. So for fast package build times.. make sure your packages supports parallel building. For developers, abel.debian.org is porter machine with Armada XP. It has schroot's for both armel and armhf. set "DEB_BUILD_OPTIONS=parallel=4" and off you go. Finally I'd like to thank Thomas Petazzoni, Maen Suleiman, Hector Oron, Steve McIntyre, Adam Conrad and Jon Ward for making the upgrade happen. Meanwhile, we have unrelated trouble - a bunch of disks have broken within a few days apart. I take the warranty just run out... [1] only from Linux's point of view. - mv78200 has actually 2 cores, just not SMP or coherent. You could run an RTOS on the other core while you run Linux on the other.
 When packaging software for Debian, there exist two important assumptions:
When packaging software for Debian, there exist two important assumptions: