Recently I have been very hopeful about the
96boards Hikey SBC and as
Evan Esar predicted I have therefore been very disappointed. I was given a Hikey after a Linaro connect event some time ago by another developer who could not get the system working usefully and this is the tale of what followed.
The Standard Design
This board design was presented as Linaro creating a standard for the 64bit Single Board Computer (SBC) market. So I had expected that a project with such lofty goals would have considered many factors and provided at least as good a solution as the existing 32bit boards.
The lamentable hubris of creating a completely new form factor unfortunately sets a pattern for the whole enterprise. Given the aim towards "makers" I would have accepted that the system would not be a ATX PC size motherboard, but
mini/micro/nano and pico ITX have been available for several years.
If opting for a smaller "credit card" form factor why not use one of the common ones that have already been defined by systems such as the Raspberry Pi B+? Instead now every 96Board requires special cases and different expansion boards.
Not content with defining their own form factor the design also uses a 8-18V supply, this is the only SBC I own that is not fed from a 5V supply. I understand that a system might require more current than a micro USB connector can provide, but for example the Banana Pi manages with a
DC barrel jack readily capable of delivering 25W which would seem more than enough
The new form factor forced the I/O connectors to be placed differently to other SBC, given the opportunity to concentrate all connectors on one edge (like ATX designs) and avoid the issues where two or three sides are used. The 96board design instead puts connectors on two edges removing any possible benefit this might have given.
The actual I/O connectors specified are rather strange. There is a mandate for HDMI removing the possibility of future display technology changes. The odd USB arrangement of two single sockets instead of a stacked seems to be an attempt to keep height down but the expansion headers and CPU heatsink mean this is largely moot.
The biggest issue though is mandating WIFI but not Ethernet (even as an option), everything else in the design I could logically understand but this makes no sense. It means the design is not useful for many applications without adding USB devices.
Expansion is presented as a 2mm pitch DIL socket for "low speed" signals and a high density connector for "high speed" signals. The positioning and arrangement of these connectors proffered an opportunity to improve upon previous SBC designs which was not taken. The use of 2mm pitch and low voltage signals instead of the more traditional 2.54mm pitch 3.3v signals means that most maker type applications will need adapting from the popular Raspberry Pi and Arduino style designs.
In summary the design appears to have been a Linaro project to favour one of their members which took a Hisilicon Android phone reference design and put it onto a board with no actual thought beyond getting it done. Then afterwards attempted to turn that into a specification, this has simply not worked as an approach.
My personal opinion is that this specification is fatally flawed and, is a direct cause of, the bizarre situation where the "consumer" specification exists alongside the "enterprise" edition which itself has an option of microATX form factor anyhow!
The ImplementationIf we ignore the specification appearing to be nothing more than a codification of the original HiKey design we can look at the HiKey as an implementation.
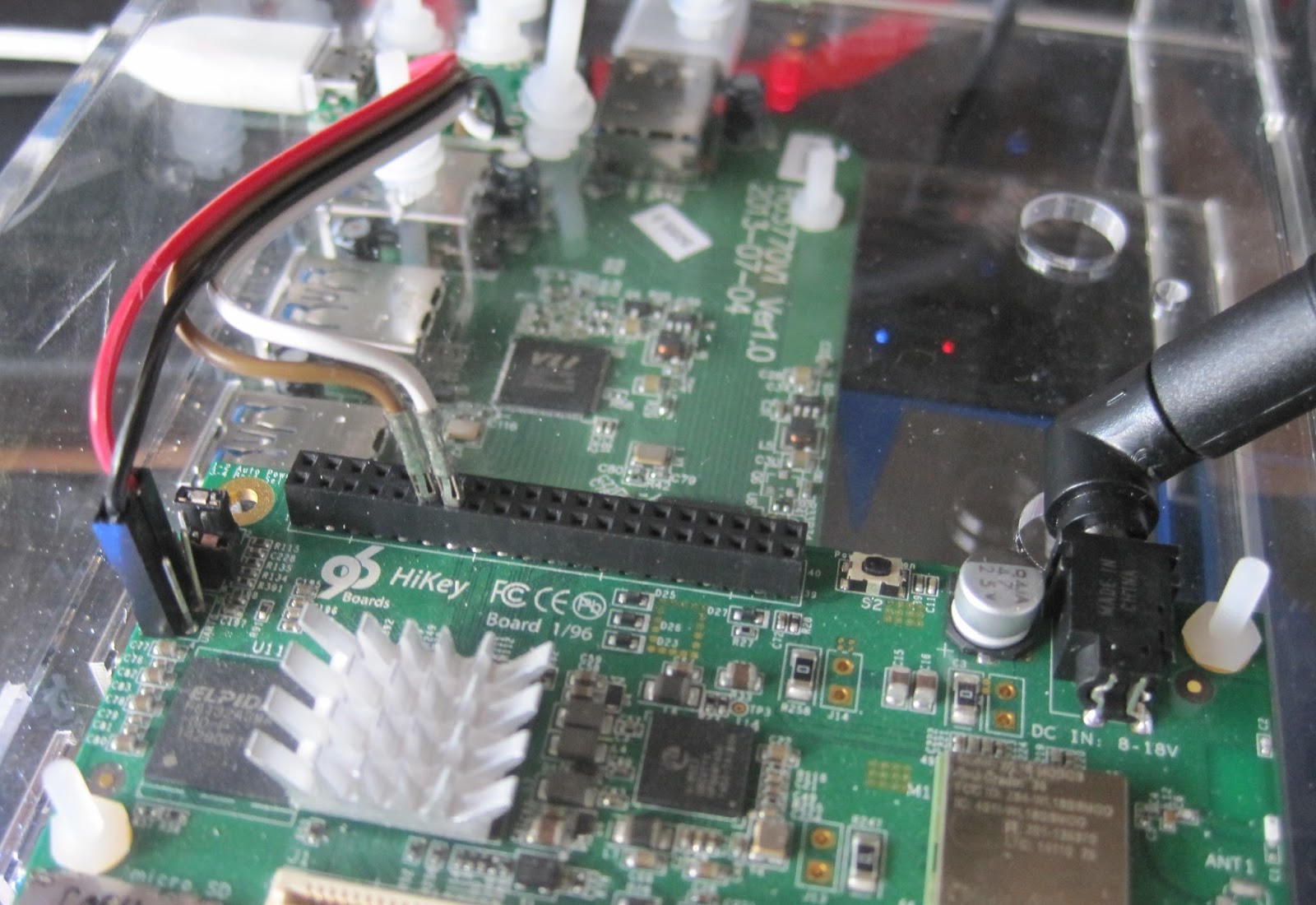
Initially the board required modifying to add headers to attach a USB to 1.8V LVTTL serial adaptor on the UART0 serial port. Once Andy Simpkins had made this change for me I was able to work through the instructions and attempt to install a bootloader and OS image.
The initial software was essentially HiSilicon vendor code using the Android fastboot system to configure booting. There was no source and the Ubuntu OS images were an obvious afterthought to the Android images. Just getting these images installed required a great deal of effort, repetition and debugging. It was such a dreadful experience this signalled the commencement one of the repeated hiatuses throughout this project, the allure of 64 bit ARM computing has its limits even for me.
When I returned to the project I attempted to use the system from the on-board eMMC but the pre-built binary only kernel and OS image were very limited. Building a replacement kernel , or even modules for the existing one proved fruitless and the system was dreadfully unstable.
I wanted to use the system as a builder for some Open Source projects but the system instability ruled this out. I considered attempting to use virtualisation which would also give better system isolation for builder systems. By using KVM running a modern host kernel and OS as a guest this would also avoid issues with the host systems limitations. At which point I discovered the system had no virtualisation enabled apparently because the bootloader lacked support.
In addition to these software issues there were hardware problems, despite forcing the use of USB for all additional connectivity the USB implementation was dreadful. For a start all USB peripherals have to run at the same speed! One cannot mix full (12Mbit) and high speed (480Mbit) devices which makes adding a USB Ethernet and SATA device challenging when you cannot use a keyboard.
And because I needed more challenges only one of the USB root hubs was functional. In effect this made the console serial port critical as it was the only reliable way to reconfigure the system without a keyboard or network link (and WIFI was not reliable either)

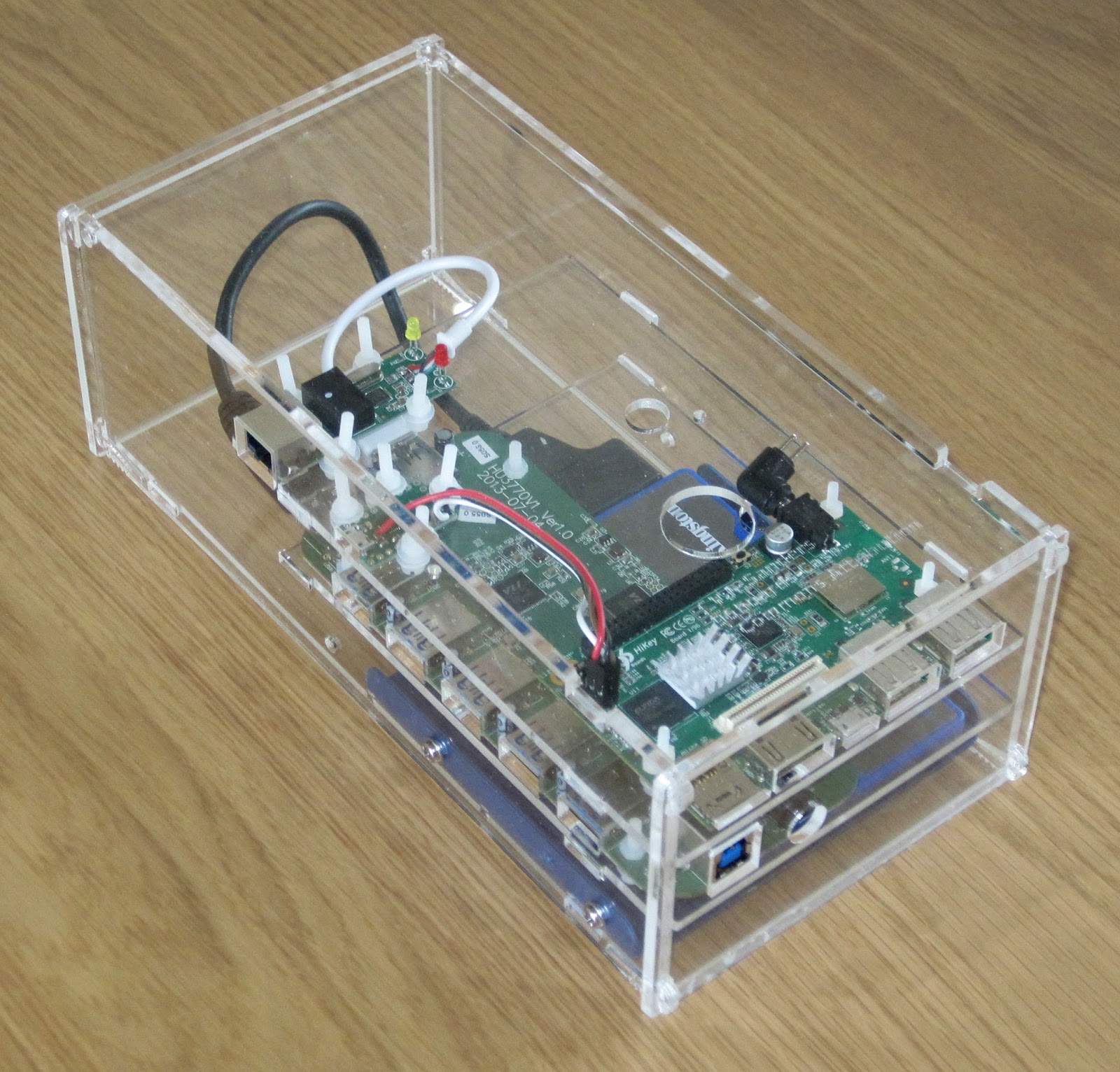
After another long pause in proceedings I decided that I should house all the components together and that perhaps being out on my bench might be the cause of some instability. I purchased a powered Amazon basics USB 2 hub, an Ethernet adaptor and a USB 2 SATA interface in the hope of accessing some larger mass storage.
The USB hub power supply was 12V DC which matched the Hikey requirements so I worked out I could use a single 4A capable supply and run a 3.5inch SATA hard drive too.
I designed a laser cut enclosure and mounted all the components. As it turned out I only had a 2.5inch hard drive handy so the enclosure is a little over size. If I were redoing this design I would attempt to make it fit in 1U of height and be mountable in a 19inch rack instead it is an 83mm high (under 2U) box.
A new software release had also become available which purported to use an UEFI bootloader after struggling to install this version unsuccessfully, made somewhat more problematic by the undocumented change from UART0 (unpopulated header) to UART3 on the low speed 2mm pitch header. The system seemed to start the kernel which panicked and hung either booting from eMMC or SD card. Once again the project went on hold after spending tens of hours trying to make progress.
Third time's a charmAs the year rolled to a close I once again was persuaded to look at the hikey, I followed the much
improved instructions and installed the shiny new
November software release which appears to have been made for the
re-release of the Hikey through LeMaker. This time I obtained a Debian "jessie" system that booted from the eMMC.
Having a booted system meant I could finally try and use it. I had decided to try and use the system to host virtual machines used as builders within the NetSurf CI system.
The basic OS uses a mixture of normal Debian packages with some replacements from Linaro repositories. I would have prefered to see more use of Debain packages even if they were from the backports repositories but on the positive side it is good to see the use of Debian instead of Ubuntu.
The kernel is a heavily patched 3.18 built in a predominantly monolithic (without modules) manner with the usual exceptions such as the mali and wifi drivers (both of which appear to be binary blobs). The use of a non-mainline capable SoC means the standard generic distribution kernels cannot be used and unless Linaro choose to distribute a kernel with the feature built in it is necessary to compile your own from sources.
The default install has a linaro user which I renamed to my user and ensured all the ssh keys and passwords on the system were changed. This is an important step when using this pre-supplied images as often a booted system is identical to every other copy.
To access mass storage my only option was via USB, indeed to add any additional expansion that is the only choice. The first issue here is that the USB host support is compiled in so when the host ports are initialised it is not possible to select a speed other than 12MBit. The speed is changed to 480Mbit by using a user space application found in the users home directory (why this is not a tool provided by a package and held in sbin I do not know).
When the usb_speed tool is run there is a chance that the previously enumerated devices will be rescanned and what was /dev/sda has become /dev/sdb if this happens there is a high probability that the system must be rebooted to prevent random crashes due to the "zombie" device.
Because the speed change operation is unreliable it cannot be reliably placed in the boot sequence so this must be executed by hand on each boot to get access to the mass storage.
NetSurf project already uses a x86_64 virtual host system which runs an LLVM physical volume from which we allocate logical volumes for each VM. I initially hoped to do this with the hikey but as soon as I tried to use the logical volume with a VM the system locked up with nothing shown on console. I did not really try very hard to discover why and instead simply used files on disc for virtual drives which seemed to work.
To provide reliable network access I used a USB attached Ethernet device, this like the mass storage suffered from unreliable enumeration and for similar reasons could not be automated requiring manually using the serial console to start the system.
Once the system was started I needed to install the guest VM. I had hoped I might be able to install locally from Debian install media as I do for x86 using the libvirt tools. After a great deal of trial and error I finally was forced to abandon this approach when I discovered the Linaro kernel is lacking iso9660 support so installing from standard media was not possible.
Instead I used the
instructions provided by Leif Lindholm to create a virtual machine image on my PC and copied the result across. These instructions are great except I used version 2.5 of Qemu instead of 2.2 which had no negative effect. I also installed the Debian backports for Jessie to get an up to date 4.3 kernel.
After copying the image to the Hikey I started it by hand from the command line as a four core virtual machine and was successfully able to log in. The guest would operate for up to a day before stopping with output such as
$
Message from syslogd@ciworker13 at Jan 29 07:45:28 ...
kernel:[68903.702501] BUG: soft lockup - CPU#0 stuck for 27s! [mv:24089]
Message from syslogd@ciworker13 at Jan 29 07:45:28 ...
kernel:[68976.958028] BUG: soft lockup - CPU#2 stuck for 74s! [swapper/2:0]
Message from syslogd@ciworker13 at Jan 29 07:47:39 ...
kernel:[69103.199724] BUG: soft lockup - CPU#3 stuck for 99s! [swapper/3:0]
Message from syslogd@ciworker13 at Jan 29 07:53:21 ...
kernel:[69140.321145] BUG: soft lockup - CPU#3 stuck for 30s! [rs:main Q:Reg:505]
Message from syslogd@ciworker13 at Jan 29 07:53:21 ...
kernel:[69192.880804] BUG: soft lockup - CPU#0 stuck for 21s! [jbd2/vda3-8:107]
Message from syslogd@ciworker13 at Jan 29 07:53:21 ...
kernel:[69444.805235] BUG: soft lockup - CPU#3 stuck for 22s! [swapper/3:0]
Message from syslogd@ciworker13 at Jan 29 07:55:21 ...
kernel:[69570.177600] BUG: soft lockup - CPU#1 stuck for 112s! [systemd:1]
Timeout, server 192.168.7.211 not responding.
After this output the host system would not respond and had to be power cycled never mind the guest!
Once I changed to single core operation the system would run for some time until the host suffered from the dreaded kernel OOM killer. I was at a loss as to why the oom killer was running as the VM was only allocated half the physical memory (512MB) allowing the host what I presumed to be an adequate amount.
By adding a 512MB swapfile the system was able to push the few hundred kilobytes it wanted to swap and the system was now stable! The swapfile of course has to be started by hand as the external storage is unreliable and unavailable at boot.
I converted the qemu command line to a libvirt config using the virsh tool
virsh domxml-from-native qemu-argv cmdln.args
The converted configuration required manual editing to get a working system but now I have a libvirt based VM guest I can control along with all my other VM using the virt-manager tool.
This system is now stable and has been in production use for a month at time of writing. The one guest VM is a single core 512MB aarch64 system which takes over 1100 seconds (19 minutes) to do what a Banana Pi 2 dual core 1GB memory 32bit native ARM system manages in 300 seconds.
It seems the single core limited memory system with USB SATA attached storage is very, very slow.
I briefly attempted to run the CI system job natively within the host system but within minutes it crashed hard and required a power cycle to retrieve, it had also broken the UEFI boot. I must thank Leif for walking me through recovering the system otherwise I would have needed to start over.
ConclusionsI must stress these conclusions and observations are my own and do not represent anyone else.
My main conclusions are:
- My experience is of a poorly conceived, designed and implemented product rushed to market before it was ready.
- It was the first announced 64bit ARM single board computer to market but that lead was squandered with issues around availability, reliability and software.
- Value for money appears poor. Product is 70 plus an additional 50 for USB hubs, power supplies, USB Ethernet and USB SATA. Other comparable SBC are around the 30 mark and require fewer extras.
- The limited I/O within the core product yields a heavy reliance on USB
- The USB system is poorly implemented resulting in large additional administrative burdens.
- Limited memory of 1Gigabyte reduces the scope for making use of the benefits of 64bit processors.
- Recent change to UEFI bootloader is very welcome and something I would like to see across all aarch64 platforms. This is the time for there to be a single unified boot method, having to deal with multiple bad copies of bootloaders in the 32bit world was painful, perhaps this mistake can be avoided in the future.
- The kernel provision is abysmal and nothing like the quality I would expect from Linaro. The non-upstream kernel combined with missing features after almost a year of development is inexplicable.
- The Pine64 with 2G of memory and the Raspberry Pi 3 with its de-facto standard form factor are both preferable despite their limitations in other areas.
This project has taken almost a year to get to the final state and has been one of the least enjoyable within that time. The only reason I have a running system at the end of it is sheer bloody mindedness because after spending hundreds of hours of my free time I was not prepared to see it all go to waste.
To be fair, the road I travelled is now much smoother and if the application is suited to having a mobile phone without a screen then the Hikey probably works as a solution. For me, however, the Hikey product with the current hardware and software limitations is not something I would recommend in preference to other options.
 It's August Bank Holiday Weekend, we're in Cambridge. It must be
the Debian
UK OMGWTFBBQ!.
We're about halfway through, and we've already polished off lots
and lots of good food and beer. Lars is making pancakes as I write
this, :-) We had an awesome game of Mao last night. People are having
fun!
Many thanks to a number of awesome friendly people for again
sponsoring the important refreshments for the weekend. It's
hungry/thirsty work celebrating like this!
It's August Bank Holiday Weekend, we're in Cambridge. It must be
the Debian
UK OMGWTFBBQ!.
We're about halfway through, and we've already polished off lots
and lots of good food and beer. Lars is making pancakes as I write
this, :-) We had an awesome game of Mao last night. People are having
fun!
Many thanks to a number of awesome friendly people for again
sponsoring the important refreshments for the weekend. It's
hungry/thirsty work celebrating like this!
 There has been a
flurry of activity on the Debian mailing lists ever since Steve
McIntyre raised the issue of including non-free firmware as part of
official Debian installation images.
Firstly I should point out that I am in complete agreement with Steve s proposal to include non-free firmware as part of an installation image. Likewise I think that we should have a separate archive section for firmware. Because without doing so it will soon become almost impossible to install onto any new hardware. However, as always the issue is more nuanced than a first glance would suggest.
Lets start by
defining what is firmware?
Firmware is any
software that runs outside the orchestration of the operating system.
Typically firmware will be executed on a processor(s) separate from
the processor(s) running the OS, but this does not need to be the
case.
As Debian we
are content that our systems can operate using fully free and open
source software and firmware. We can install our OS without needing
any non-free firmware.
This is an illusion!
Each and every PC
platform contains non-free firmware
It may be possible to run free firmware on some Graphics controllers, Wi-Fi chip-sets, or Ethernet cards and we can (and perhaps should) choose to spend our money on systems where this is the case. When installing a new system we might still be forced to hold our nose and install with non-free firmware on the peripheral before we are able to upgrade it to FLOSS firmware later if this is exists or is even possible to do so. However after the installation we are running a full FLOSS system in terms of software and firmware.
We all (almost
without exception) are running propitiatory firmware whether we like
it or not.
Even after carefully selecting graphics and network hardware with FLOSS firmware options we still haven t escaped from non-free-firmware. Other peripherals contain firmware too each keyboard, disk (SSDs and Spinning rust). Even your USB memory stick that you use to contain the Debian installation image contains a microcontroller and hence also contains firmware that runs on it.
There has been a
flurry of activity on the Debian mailing lists ever since Steve
McIntyre raised the issue of including non-free firmware as part of
official Debian installation images.
Firstly I should point out that I am in complete agreement with Steve s proposal to include non-free firmware as part of an installation image. Likewise I think that we should have a separate archive section for firmware. Because without doing so it will soon become almost impossible to install onto any new hardware. However, as always the issue is more nuanced than a first glance would suggest.
Lets start by
defining what is firmware?
Firmware is any
software that runs outside the orchestration of the operating system.
Typically firmware will be executed on a processor(s) separate from
the processor(s) running the OS, but this does not need to be the
case.
As Debian we
are content that our systems can operate using fully free and open
source software and firmware. We can install our OS without needing
any non-free firmware.
This is an illusion!
Each and every PC
platform contains non-free firmware
It may be possible to run free firmware on some Graphics controllers, Wi-Fi chip-sets, or Ethernet cards and we can (and perhaps should) choose to spend our money on systems where this is the case. When installing a new system we might still be forced to hold our nose and install with non-free firmware on the peripheral before we are able to upgrade it to FLOSS firmware later if this is exists or is even possible to do so. However after the installation we are running a full FLOSS system in terms of software and firmware.
We all (almost
without exception) are running propitiatory firmware whether we like
it or not.
Even after carefully selecting graphics and network hardware with FLOSS firmware options we still haven t escaped from non-free-firmware. Other peripherals contain firmware too each keyboard, disk (SSDs and Spinning rust). Even your USB memory stick that you use to contain the Debian installation image contains a microcontroller and hence also contains firmware that runs on it.
 watching the build progress, awaiting images to test
watching the build progress, awaiting images to test


 I ve
I ve 











 (Don t be surprised if that becomes a dead link search for APC Smart Slot Master Switch Power Distribution Unit).
Talking of power, I m looking to use SATA drives with these boards and the boards themselves come with a variety of wall wart plugs or USB cables, so a number of IEC sockets are needed not the usual plugs:
(Don t be surprised if that becomes a dead link search for APC Smart Slot Master Switch Power Distribution Unit).
Talking of power, I m looking to use SATA drives with these boards and the boards themselves come with a variety of wall wart plugs or USB cables, so a number of IEC sockets are needed not the usual plugs:




